工業技術與資訊月刊
自駕技術透過感知與演算法,代替駕駛人的眼睛與頭腦,然而,路況千變萬化,晴空萬里可以固然能自動駕駛,遇上夜間行車乃至雨霧瀰漫,是否還能行得通?工研院以深厚的車輛控制技術加上 AI 感知能力,打造出可適用多種車型的「全天候多車型自駕車」技術,現在已準備好隨時上路。

天氣越糟,越要出去開!」工研院機械與機電系統研究所所長胡竹生表示,台灣地狹人稠的特性以及多變氣候,使得路況遠比國外複雜,種種因素都為自駕車技術帶來諸多挑戰,一旦克服,台灣自駕車進入國際市場將更具優勢。工研院歷經 3 年投入自駕車研發技術,開發出「全天候多車型自駕車」,已通過日夜雨霧等各種嚴苛的天候考驗;並以工研院中興院區為試驗場域,在無任何交通管制下行駛於人車混流的環境,甚至不受訊號遮蔽影響,進入地下停車場自行停車。
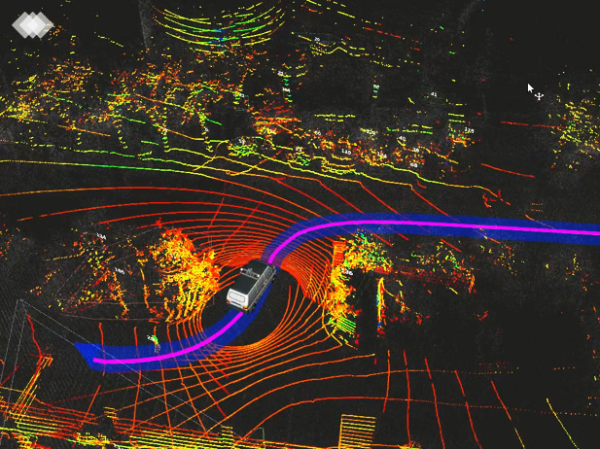
相較於多數自駕車技術倚賴 GPS 全球衛星定位系統導航,工研院運用「同步定位與地圖建構」(Simultaneous Localization and Mapping;SLAM)的技術,將路徑、障礙物、交通號誌、停車場空位等相關交通資訊迅速載入,建置出高精度 3D 地圖,一般自駕車團隊進入地下室遇到衛星訊號中斷而影響自駕車行駛的狀況,工研院的技術完全克服,甚至可搭配室內外停車功能,讓自駕車自動駛入停車位。
一旦遇到下雨天、夜間行駛,甚至因車輛經過濺起的水花,都會影響感測器蒐集資料,進而影響車輛對路況的判斷。對此,工研院開發獨家技術處理感測資料,並用即時 AI 運算能力辨識臨時的動態路況,做出正確的行車判斷,即使路上突然出現行人,也能做到減速以及緊急煞車,進而保證行車安全。「不用模擬下雨的方式,我們自駕車團隊實際在大雨中行駛,就像人在開車一樣,這樣才是真實的技術能量。」胡竹生說。
「除了靠各種感測器去感知周遭,更重要的是如何妥善地控制行車。」工研院機械所數位長王傑智指出,自駕車的感知能力與車控能力其實是一體兩面的技術,當車輛感知到外部氣候變化,如下雨造成地面溼滑,需要透過高精度的控制技術避免輪胎打滑。目前工研院的全天候多車型自駕車車速不僅可達時速 60 公里,其自駕等級已達到美國汽車工程師協會所定義的自駕車「Level 4」等級。

不同的車型有不同的駕馭控制技術,目前多數自駕技術僅針對單一種車型進行測試,工研院以跨領域優勢,長期投入車輛的機械技術與研究,對各車型差異與需求瞭若指掌,所研發的自駕車系統能做到快速安裝、調適與控制,還能依照車型外觀上的需求,快速安裝感測器,同時確保自駕車的性能與安全,成功安裝在小貨卡、轎車、休旅車、巴士、大卡車等多種車型上並通過測試運行。工研院擁有國內唯一可以快速改裝各型車款的優勢。
「人們對行車安全的需求永遠都不嫌多,」胡竹生指出,團隊目前的作法,是仰賴本身的 AI 系統與高精度 3D 地圖來完善自駕能力,但仍期待政府能早日完成交通基礎建設的通訊互聯架構,讓自駕車能接收到周邊各種交通號誌傳送來的即時訊號,輔助自駕車做出更聰明、安全的決策判斷。
胡竹生表示,從感測器、軟硬體系統、車輛到運輸與數位服務,未來自駕車技術為整體產業供應鏈帶來的變革不僅巨大而且看不到邊際,工研院的自駕車技術可因應不同車型,將技術以模組化方式提供,無論是商用運輸貨車、巴士、房車或公務用車都可滿足自駕移動需求,全天候多車型自駕車技術已經準備好隨時上路。
轉載自《工業技術與資訊》月刊第 327 期 2019 年 03 月號,未經授權不得轉載。
上一篇
下一篇
